a grasping approach based on superquadric models
Published 7 years ago • 2.8K plays • Length 2:06Download video MP4
Download video MP3
Similar videos
-
 3:00
3:00
improving superquadric modeling and grasping with prior on object shapes
-
 2:31
2:31
icub-client with superquadric-model
-
 1:44
1:44
improved superquadric modeling and grasping
-
 4:30
4:30
icub grasping small objects
-
 1:01
1:01
that is amazing robot
-
 2:46
2:46
learning grasp dependent pull affordances of tools on the icub humanoid robot
-
 3:29
3:29
multi superquadrics grasping
-
 1:40
1:40
tranferring grasping skills from armar (kit) to the icub
-
 3:16
3:16
actobotics® gripper kits - overview of 4 versions
-
 1:43
1:43
high-speed pick and place robots automate bag handling
-
 3:00
3:00
lqr-assisted whole-body control of a wheeled bipedal robot with kinematic loops (ra-l / icra 2020)
-
 1:22
1:22
single-grasp object classification & feature extraction with haptic sensing
-
 3:00
3:00
anthropomorphic grasping with neural object shape completion
-
 1:31
1:31
hierarchical grasp controller using tactile feedback
-
 0:15
0:15
a variable palm-width robot hand capable of grasping a wide array of object geometries
-
 0:23
0:23
grasping a ball.
-
 3:00
3:00
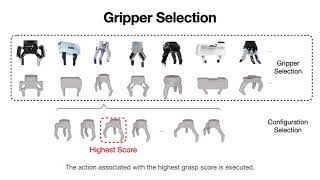
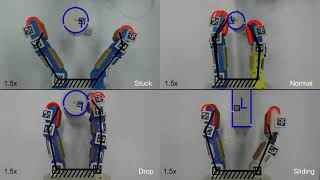
adagrasp: learning an adaptive gripper-aware grasping policy
-
 1:28
1:28
superquadrics revisited: learning 3d shape parsing beyond cuboids
-
 3:17
3:17
towards generalized manipulation learning through grasp mechanics-based features & self-supervision
-
 10:32
10:32
mechanical intelligence for adaptive precision grasp - icra 2021 presentation
-
 2:01
2:01
vision-based aided-grasping in teleoperation with multiple unknown objects