achires: robust bipedal running based on high-speed visual feedback
Published 6 years ago • 22K plays • Length 1:33Download video MP4
Download video MP3
Similar videos
-
 1:07
1:07
achires: bipedal running using high-speed visual feedback
-
 0:56
0:56
(no narration version) achires: bipedal running using high-speed visual feedback
-
 1:31
1:31
achires: improved running taking dynamically unstable posture achieved with high-speed vision
-
 1:14
1:14
running progress - the history of project achires -
-
 1:20
1:20
high-speed, non-deformation catching with high-speed vision and proximity feedback
-
 3:32
3:32
supplementary walking experiments - rl for versatile, dynamic, and robust bipedal locomotion control
-
 5:23
5:23
how reachy mobile base works ?
-
 40:01
40:01
falcon integration kit webinar | reach robotics
-
 3:59
3:59
honda's asimo: the penalty-taking, bar-tending robot
-
 1:34
1:34
allowable limits of latencies in delay control visual feedback system
-
 5:01
5:01
ultra high-speed robot based on 1 khz vision system
-
 0:37
0:37
meet achires: daily planet
-
 0:29
0:29
high-speed catching system
-
 1:11
1:11
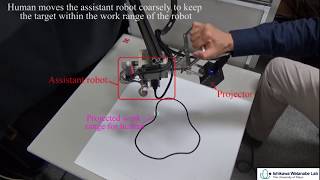
active assistant robot - human robot cooperation based on a new high-speed vision
-
 0:20
0:20
dynamic horizontal movement of a bipedal robot using frictional asymmetry
-
 2:36
2:36
supplementary running experiments - rl for versatile, dynamic, and robust bipedal locomotion control
-
 0:59
0:59
bipedal robot sets running record
-
 0:42
0:42
japan′s bipedal robot dashes to 4.3 km per hour 시속 4.2km 달리는 두발 로봇 공개
-
 11:40
11:40
reinforcement learning for robust parameterized locomotion control of bipedal robots
-
 1:19
1:19
accurate and robust inter-vehicle distance estimation with stereo high-speed vision