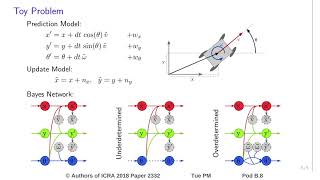
an opportunistic linear-convex algorithm for localization in mobile robot networks
Published 6 years ago • 44 plays • Length 3:09Download video MP4
Download video MP3
Similar videos
-
 2:51
2:51
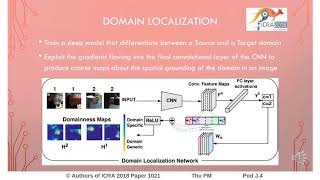
adaptive deep learning through visual domain localization
-
 3:01
3:01
vision-based global localization using ceiling space density
-
 2:59
2:59
cat-net: visual localization under illumination change (ieee ra-l / icra'18)
-
 26:32
26:32
mod05lec25 - mobile robot localisation
-
 3:55
3:55
optimizing localization for amr using statistical and neural network algorithms | ros | mobile robot
-
 5:43
5:43
talk by l. wiesmann: , “locndf: neural distance field mapping for robot localization (ral-icar'24)
-
 21:05
21:05
how to make a simple smart robot vacuum cleaner version 2
-
 2:11
2:11
multi-contact inertial estimation and localization in legged robots
-
 2:26
2:26
learning place-and-time-dependent binary descriptors for long-term visual localization
-
 3:00
3:00
contact point localization for articulated manipulators with proprioceptive sensors and machine lear
-
 3:00
3:00
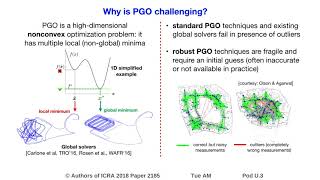
convex relaxations for pose graph optimization with outliers
-
 2:39
2:39
line-based global localization of a spherical camera in manhattan worlds
-
 22:29
22:29
roscon 2018 madrid cloud based mapping and localization in dynamic warehouse environments
-
 1:31
1:31
cooperative inchworm localization (icra 2017)
-
 3:00
3:00
icra 2020 experiments - a distributed source term estimation algorithm for multi-robot systems
-
 0:39
0:39
localization for mobile robots - data generation 1
-
 3:28
3:28
robust localization of a mobile robot using information retrieval techniques (2/2)
-
 1:46:13
1:46:13
lecture 11-localization
-
 2:54
2:54
reflection-aware sound source localization
-
 3:01
3:01
the two-state implicit filter - recursive estimation for mobile robots
-
 3:47
3:47
robust localization of a mobile robot using information retrieval techniques (1/2)