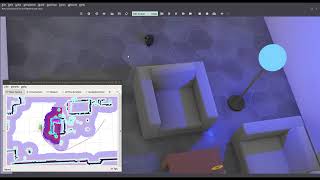
autonomous mapping in unknown environment | robot gmapping | webots ros simulator | [tutorial 3]
Published 4 years ago • 8.7K plays • Length 15:31Download video MP4
Download video MP3
Similar videos
-
 24:34
24:34
gmapping | ros with webots | robotic software picodegree | part 4 | best mapping package
-
 5:52
5:52
autonomous mapping in an unknown environment
-
![setting up environment | webots simulator | [tutorial 1]](https://i.ytimg.com/vi/yi4e5FoVWbQ/mqdefault.jpg) 15:03
15:03
setting up environment | webots simulator | [tutorial 1]
-
 1:01:59
1:01:59
localization, mapping & slam using gmapping package | ros tutorials for beginners | lesson 7
-
 1:03
1:03
autonomous mapping with webots and ros2
-
 18:22
18:22
using ros slam on the real robot like atcart!
-
 12:09
12:09
ros 2-d mapping with lidar hector slam (in bahasa)
-
 17:04
17:04
ros2 tutorial. how to run ros2 on your robot. implementing custom hardware interface
-
 0:59
0:59
ros2, webots, navigation2, turtlebot 3 burger and rviz2
-
 25:47
25:47
easy slam with ros using slam_toolbox
-
 17:17
17:17
obstacle avoiding robot | movebase using lidar | webots ros | robotic software picodegree | part 6
-
 5:06
5:06
what is gmapping ? | theory | ros | example | robotics concepts
-
![project implementation of slam toolbox | unknown environment |mapping ros2 tutorials | [tutorial 11]](https://i.ytimg.com/vi/3Ak3KoNhfv0/mqdefault.jpg) 28:12
28:12
project implementation of slam toolbox | unknown environment |mapping ros2 tutorials | [tutorial 11]
-
 6:16
6:16
understanding autonomous navigation in ros2: mapping, planning, and execution
-
 18:01
18:01
learn basics of autonomous navigation for custom robot using ros | simple tutorial | 2022
-
 0:37
0:37
autonomous mapping with webots and ros2 in a smaller room
-
 0:14
0:14
webots inverted pendulum reinforcement learning tutorial
-
![ros-webots 101 | webots ros simulator | [tutorial 1]](https://i.ytimg.com/vi/OYGfaE5gp0o/mqdefault.jpg) 6:03
6:03
ros-webots 101 | webots ros simulator | [tutorial 1]