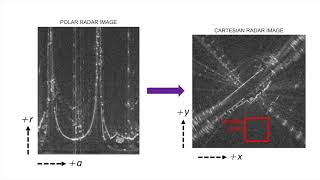
bounded error pose estimation using overhead priors
Published 13 years ago • 185 plays • Length 0:42Download video MP4
Download video MP3
Similar videos
-
 5:00
5:00
self-supervised localisation between range sensors and overhead imagery
-
 3:31
3:31
robust single-view geometry and motion reconstruction
-
 0:44
0:44
a 7-dof redundant arm exhibiting real-time inverse kinematics on a rectangular path
-
 5:01
5:01
get to the point: learning lidar place recognition and metric localisation using overhead imagery
-
 7:02
7:02
multi-tap resistive sensing and fem modeling enables shape and force estimation in soft robots
-
 57:33
57:33
virtual humans -- lecture 07.1 fitting smpl to imu optimization
-
 1:05:08
1:05:08
overparameterization and global optimality in nonconvex low-rank matrix estimation and optimization
-
 0:31
0:31
slow robots for unobtrusive posture correction
-
 1:14
1:14
finger pose estimation: a novel two-stage approach
-
 3:00
3:00
radar-only ego-motion estimation in difficult settings via graph matching
-
 7:40
7:40
how to manage occlusion, pose & viewpoint variation problems in human detection solutions? ep-12
-
 0:48
0:48
relative slam on large scales
-
 9:40
9:40
tp2 w4 s4 2602567875 revision 2
-
 1:22
1:22
approximate steering of a unicycle under bounded model perturbation using ensemble control
-
 4:08
4:08
modern robotics, chapter 12.1.7: form closure
-
 3:01
3:01
under the radar: learning to predict robust keypoints for odometry estimation in radar
-
 2:31
2:31
precise ego-motion estimation with millimeter-wave radar under diverse and challenging conditions
-
 2:54
2:54
fourier exoskeleton & robotics open platform system (exops)
-
 1:01
1:01
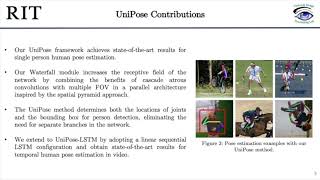
unipose: unified human pose estimation in single images and videos