correct and clear explanation of rotation matrices in robotics - learn robotics correctly
Published 2 weeks ago • 302 plays • Length 21:20Download video MP4
Download video MP3
Similar videos
-
 16:08
16:08
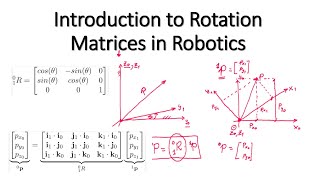
introduction to rotation matrices in robotics
-
 17:38
17:38
correct explanation of yaw, pitch, and roll euler angles with rotation matrices and python code
-
 11:31
11:31
easy rotation matrix tutorial for robotics and aerospace - derivation of y-axis rotation matrix
-
 10:13
10:13
spatial descriptions and transformation matrices for robotic manipulators
-
 11:22
11:22
understanding the rotation matrix
-
 9:01
9:01
robotic systems. rotation matrix. | | upv
-
 12:41
12:41
easy rotation matrix tutorial for robotics and aerospace - derivation of x-axis rotation matrix
-
 13:16
13:16
how to implement an inertial measurement unit (imu) using an accelerometer, gyro, and magnetometer
-
 1:03:11
1:03:11
understanding robot absolute accuracy webinar
-
 18:36
18:36
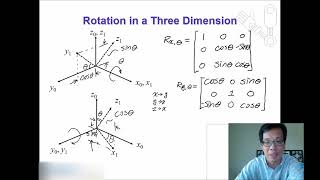
rotation in three dimension
-
 22:01
22:01
robotics 1 u1 (kinematics) s3 (rotation matrices) p1 (rotation matrices)
-
 10:48
10:48
rotation matrix tutorial for robotics and aerospace - z rotation - complete derivation
-
 30:46
30:46
rotation matrices in robotics | fundamentals of robotics | lesson 8
-
 11:14
11:14
2.3 rotations in 3d
-
 9:57
9:57
lecture 1c - 4: rotation matrix (robotics utec 2018-1)
-
 34:10
34:10
robotics 1 u1 (kinematics) s3 (rotation matrices) p4 (6-dof example and error checking)
-
 15:43
15:43
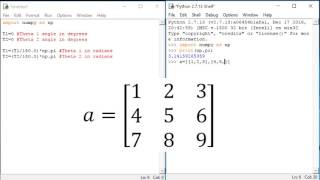
define symbolic rotation matrices and perform operations by using python symbolic toolbox
-
 17:01
17:01
robotics 1 u1 (kinematics) s3 (rotation matrices) p2 (rotation matrices in python)