deep visual foresight for planning robot motion
Published 7 years ago • 4.7K plays • Length 3:09Download video MP4
Download video MP3
Similar videos
-
 2:32
2:32
neural networks plus motion planning equals more useful robots, finds uc berkeley
-
 2:58
2:58
learning visual feature spaces for robotic manipulation with deep spatial autoencoders
-
 5:05
5:05
motion planning for 2-dof transformable wheel robots using reinforcement learning
-
 20:59
20:59
deep model-based rl for real-world robotic control
-
 3:48
3:48
the surprising effectiveness of linear models for visual foresight in object pile manipulation
-
 3:23
3:23
socially aware motion planning with deep reinforcement learning
-
 6:36
6:36
visual foresight tree for object retrieval from clutter with nonprehensile rearrangement
-
 3:37
3:37
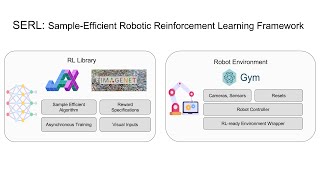
serl: a software suite for sample-efficient robotic reinforcement learning
-
 17:55
17:55
path planning with a* and rrt | autonomous navigation, part 4
-
 21:33
21:33
the surprising effectiveness of linear models for visual foresight in object pile manipulation
-
 1:02
1:02
real time contact planning and control of the solo robot in 3d environments
-
 15:28
15:28
collaborative human-robot motion planning with mixed reality | florian kennel-maushart
-
 18:22
18:22
trajectory planning for robot manipulators
-
 0:16
0:16
robot coverage: contour-following with uncertainty
-
 14:02
14:02
transporter networks: rearranging the visual world for robotic manipulation
-
 4:22
4:22
end-to-end training of deep visuomotor policies
-
 12:36
12:36
introduction to motion planning algorithms | motion planning with the rrt algorithm, part 1