denavit hartinberg example forward kinematic
Published 7 years ago • 53K plays • Length 14:07Download video MP4
Download video MP3
Similar videos
-
 8:26
8:26
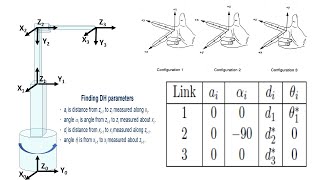
denavit–hartenberg parameters of a 3-link manipulator with prismatic joint - example
-
 3:01
3:01
denavit-hartenberg reference frame layout
-
 11:44
11:44
denavit - hartenberg (dh) tables for robotic systems - direct kinematics ii
-
 5:21
5:21
introduction to dh convention
-
 15:21
15:21
robotics 2 u1 (kinematics) s2 (denavit-hartenberg) p2 (frames)
-
 15:19
15:19
robotics 2 u1 (kinematics) s2 (denavit-hartenberg) p3 (parameter table)
-
 36:26
36:26
robotics: lecture 04 (forward kinematics)
-
 21:56
21:56
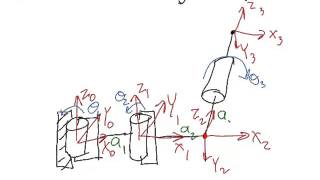
denavit – hartenberg modelling for cylindrical robot
-
 4:52
4:52
denavit hartenberg example
-
 14:11
14:11
2 1 2 lecture video 4 of 4 denavit hartenberg example
-
 28:13
28:13
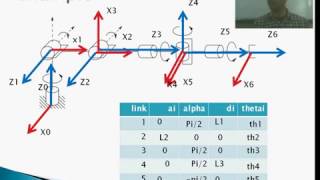
rebotics_07_forward kinematics example 01 (dh parameters)
-
 22:16
22:16
intro2robotics lecture 5b: forward kinematics examples
-
 30:16
30:16
robotics 1 u1 (kinematics) s5 (htm) p2 (htm by denavit hartenberg)
-
 22:29
22:29
worked example - frame assignment | dh tables | transformation matrices (direct kinematics iv)
-
 15:46
15:46
frame assignment for robotic manipulators - direct kinematics i
-
 20:17
20:17
rebotics_07_forward kinematics example 02 ( dh parameters )
-
 10:25
10:25
video tutorial on forward kinematic for rpr robot
-
 16:31
16:31
denavit hartenberg notation
-
 12:46
12:46
2 1 2 lecture video 3 of 4 denavit hartenberg coordinate frames