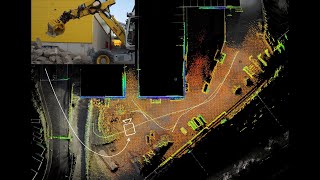
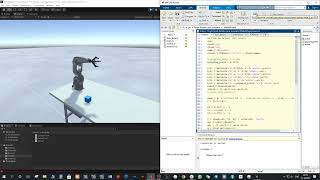
graph-based multi-sensor fusion for consistent localization of autonomous construction robots (talk) Published 2 years ago • 3.6K plays • Length 3:52 Download video MP4 Download video MP3 Similar videos 3:00 graph-based multi-sensor fusion for consistent localization of autonomous construction robots (sup.) 0:13 matlab and unity simulator for faze4 robot 1:43 a picking robot for the greenhouse 3:21 design and motion planning for a reconfigurable robotic base