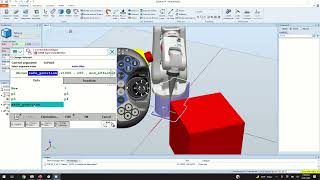
how to add gripper and use teach method to define robot path and program robot - abb robotstudio
Published 2 months ago • 296 plays • Length 13:08Download video MP4
Download video MP3
Similar videos
-
 1:06
1:06
how to add gripper and program robot path in abb robot studio - tutorial link provided below
-
 11:09
11:09
insert gripper or end-effector and attach it to the robot model - abb robotstudio tutorials
-
 14:16
14:16
introduction to abb robot coding- write a simple code for moving and closing the gripper
-
 20:40
20:40
how to easy program abb robots to follow path - rapid and abb robotstudio
-
 10:39
10:39
how to define path and move robot along a path in abb robot studio
-
 1:06:05
1:06:05
robotstudio® mid-year webinar 2024
-
 21:05
21:05
how to make a simple smart robot vacuum cleaner version 2
-
 3:32
3:32
teaching robots new behaviors
-
 5:25
5:25
abb irc5 programming - logic - digital inputs
-
 29:33
29:33
amazing abb robotstudio tutorial on gripper modeling, pick and place simulation, and rapid coding
-
 19:41
19:41
learn to code abb robots to perform pick and place tasks using rapid programming- ryan bliss
-
 7:52
7:52
learning rapid basics | programming in rapid abb robots | robotic systems
-
 15:33
15:33
tutorial 2 using abb library for gripper and targets
-
 9:58
9:58
abb robot studio - calculate and visualize robot and tool work envelopes
-
 21:02
21:02
abb robot tutorial: introduction to programming in robotstudio
-
 9:51
9:51
abb robotstudio tutorial 1: jogging, manipulate views, and motion modes-linear, axis, and reorient