icra 2020: "robust 6d object pose estimation by learning rgb-d features"
Published 3 years ago • 1.3K plays • Length 9:21Download video MP4
Download video MP3
Similar videos
-
 4:20
4:20
ra-l & icra2024: enhancing generalizable 6d pose tracking of an in-hand object with tactile sensing
-
 56:48
56:48
3d computer vision | lecture 4 (part 1): robust homography estimation
-
 1:30
1:30
eccv2020 spotlight: "multi-person 3d pose estimation in crowded scenes based on multi-view geometry"
-
![[icra 2019] propagation networks for model-based control under partial observation](https://i.ytimg.com/vi/ZAxHXegkz48/mqdefault.jpg) 1:27
1:27
[icra 2019] propagation networks for model-based control under partial observation
-
 8:03
8:03
image acquisition using sensor strips and gray scale representation explained! | dr. loay al-zube
-
 58:22
58:22
jun yang on 6d pose est. for textureless objects on rgb frames using mv. optimization | air seminar
-
 11:08
11:08
imagej를 이용한 전극 면적 측정법 (how to measure exact electrode surface area by image j)
-
 7:20
7:20
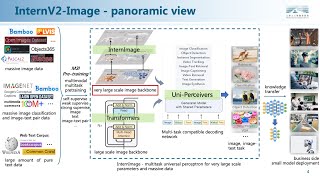
cvpr23 | internimage: exploring large-scale vision foundation models with deformable convolutions
-
 5:04
5:04
digimizer - how to measure an area on an image
-
 46:11
46:11
3d computer vision | lecture 8 (part 1): absolute pose estimation from points or lines
-
 1:36
1:36
cyberoptics launches ultra-high resolution mrs sensor at apex 2017
-
 0:55
0:55
r33 vj/mapping set | aximmetry
-
 2:29
2:29
ra-l/icra19 - efficient segment matching for lidar localization
-
 4:21
4:21
dome - flat panel displays provide accurate, precise calibration
-
 3:29
3:29
camera acquire image, measure length
-
 2:05
2:05
eo imaging lab 1.3: resolution
-
 1:18:05
1:18:05
3d computer vision | lecture 2 (part 1): rigid body motion and 3d projective geometry
-
 1:00:19
1:00:19
3d computer vision | lecture 5 (part 1): camera models and calibration
-
 1:11
1:11
avuri centralized device management for ultrasound
-
 44:26
44:26
3d computer vision | lecture 2 (part 2): rigid body motion and 3d projective geometry