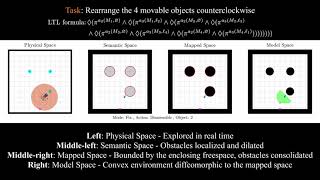
icra 2021 - reactive planning for mobile manipulation tasks in unexplored semantic environments
Published 3 years ago • 139 plays • Length 10:37Download video MP4
Download video MP3
Similar videos
-
 6:13
6:13
reactive planning for mobile manipulation tasks in unexplored semantic environments
-
 14:41
14:41
iros 2020 presentation - reactive semantic planning in unexplored semantic environments
-
 1:03:47
1:03:47
vasileios vasilopoulos' defense - "reactive planning with legged robots in unknown environments"
-
 2:57
2:57
motion planning for mobile manipulators with physical contact in uncertain environment (icra 2021)
-
 1:10
1:10
task assignment and motion planning for bi-manual mobile manipulation
-
 31:36
31:36
beomjoom kim (kaist) -- meta-reasoning for task and motion planning
-
 10:12
10:12
2022 icra competition chair - mark yim
-
 6:59
6:59
actor-critic model predictive control (talk icra 2024)
-
 3:00
3:00
icra 2021 - planning for multi-stage forceful manipulation
-
 5:01
5:01
a hierarchical deliberative-reactive system architecture for task and motion planning
-
 3:00
3:00
viplanner: visual semantic imperative learning for local navigation (icra 2024)
-
 3:25
3:25
sensor-based reactive execution of symbolic rearrangement plans by a legged mobile manipulator
-
 1:20
1:20
icra 2019: real-time planning with multi-fidelity models for agile flights in unknown environments
-
 4:56
4:56
pal 2020 talk: go fetch: mobile manipulation in unstructured environments