intro2robotics lecture 16: stereo vision and vanishing points
Published 4 years ago • 1.7K plays • Length 30:01Download video MP4
Download video MP3
Similar videos
-
 24:19
24:19
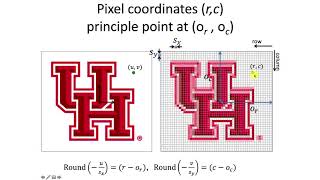
intro2robotics lecture 15: computer vision, world frame to camera frame to pixel coordinates
-

unplugged vision is live
-
 25:06
25:06
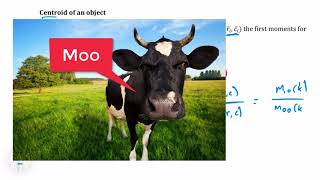
intro2robotics18: centroids and moments with computer vision
-
 16:34
16:34
simple stereo | camera calibration
-
 1:27:30
1:27:30
multiple view geometry - lecture 1 (prof. daniel cremers)
-
 5:59
5:59
camera intrinsics and extrinsics - 5 minutes with cyrill
-
 7:05
7:05
introduction to the braillesense6
-
 28:40
28:40
class 16 - stereopsis
-
 16:06
16:06
stereo - 15 - introduction to computer vision - cmpt 361
-
 1:08:49
1:08:49
lecture 3 | computer vision
-
 1:29:44
1:29:44
vision course: lecture 6 - stereovision