intro2robotics lecture 22a: path-planning, two-link robot arm
Published 6 years ago • 6.4K plays • Length 8:07Download video MP4
Download video MP3
Similar videos
-
 28:05
28:05
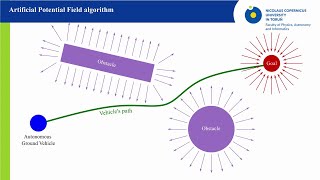
intro2robotics lecture 22c: artificial potential fields for robot path planning
-
 4:01
4:01
how close are 2 configurations of a robot? (lecture 23b, intro 2 robotics)
-
 0:45
0:45
artificial potential field path-planning on a planar serial-link robot
-
 13:26
13:26
prm: probabilistic roadmap method in 3d and with 7-dof robot arm
-
![motion planning algorithms (rrt, rrt*, prm) - [mit 6.881 final project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg) 5:41
5:41
motion planning algorithms (rrt, rrt*, prm) - [mit 6.881 final project]
-
 7:54
7:54
a comparison of pathfinding algorithms
-
 7:31
7:31
predictive artificial potential field algorithm - energy-efficient local path planning algorithm
-
 6:11
6:11
intro2robotics lecture 1a: course overview demonstration
-
 13:39
13:39
robot configuration spaces, intro2robotics lecture 21
-
 28:33
28:33
intro2robotics lecture 1b: lecture slides and course overview
-
 0:16
0:16
robot coverage: contour-following with uncertainty
-
 0:22
0:22
global path planning vs local path planning
-
 2:21
2:21
path planning and navigation for autonomous robots
-
 11:47
11:47
2 2 3 lecture video 2 of 4 path planning
-
 0:23
0:23
optimal path 2 solution - artificial intelligence for robotics