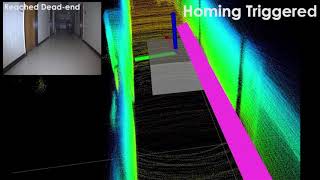
learning-based path planning for autonomous exploration of subterranean environments
Published 4 years ago • 1.5K plays • Length 2:27Download video MP4
Download video MP3
Similar videos
-
 9:20
9:20
icra2020 pitch video: learning-based path planning for exploration of subterranean environments
-
 0:59
0:59
graph-based path planning for autonomous robotic exploration in subterranean environments
-
 2:04
2:04
graph-based path planning for autonomous subterranean exploration
-
 2:21
2:21
graph-based exploration path planning - aerial robot inside an underground mine
-
 3:26
3:26
motion primitives-based path planning for path planning for agile subterranean exploration
-
 3:03
3:03
explore locally, plan globally: autonomous robotic exploration in subterranean environments
-
 3:36
3:36
autonomous teamed exploration of subterranean environments - simulation study
-
 1:44
1:44
graph-based exploration path planning in room-and-pillar underground mines
-
 2:08
2:08
graph-based path planning for autonomous inspection of underground mines
-
 18:36
18:36
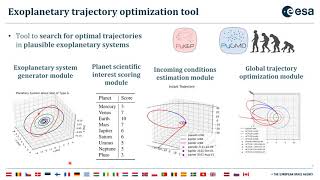
autonomous exploration of exoplanetary systems
-
 2:04
2:04
motion primitives-based path planning for fast and agile exploration using aerial robots
-
 1:07
1:07
autonomous exploration inside building corridors
-
 2:59
2:59
autonomous teamed exploration of subterranean environments using legged and aerial robots
-
 5:05
5:05
gbplanner2: graph-based exploration path planner 2.0 - how it works