marrying nerf with feature matching for one-step pose estimation. (icra 2024)
Published 3 months ago • 159 plays • Length 2:32Download video MP4
Download video MP3
Similar videos
-
 3:58
3:58
smart welding with maira
-
 0:53
0:53
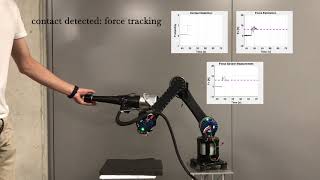
hybrid contact detection and force estimation during compliant manipulation
-
 7:02
7:02
multi-tap resistive sensing and fem modeling enables shape and force estimation in soft robots
-
 6:11
6:11
arcman™ structural steel welding robot system with fcaw (seismic application)
-
 22:16
22:16
robotics 1 u1 (kinematics) s1 (preliminaries) p2 (soldering and kit assembly)
-
 1:01
1:01
multicontact adaptation to unmodelled contact conditions
-
 2:05
2:05
compact.uni range extension - pilot project for laser-based profile measurement
-
 0:59
0:59
robotic welding fixtures: forge your vision with elite automation welding fixtures
-
 3:06
3:06
multi-arm payload manipulation via mixed reality - icra 2022 accompanying video
-
 1:01
1:01
pandanet: anchor-based single-shot multi-person 3d pose estimation
-
 25:11
25:11
consortiq - utilizing the right sensor for the right job | phase one
-
 2:54
2:54
parallel inversion of neural radiance fields for robust pose estimation
-
 0:47
0:47
adaptive robot hand for ultra-fast, aerial grasping and perching
-
 1:34
1:34
ix suite - quality assurance from flight planning to final image delivery | phase one
-
 4:01
4:01
ev-nerf : event based neural radiance field
-
 3:07
3:07
multimodal execution monitor with anomaly classification for robot-assisted feeding
-
![[rss 2024] constraint-aware intent estimation for dynamic human-robot object co-manipulation](https://i.ytimg.com/vi/jSu0y1XHkWg/mqdefault.jpg) 6:01
6:01
[rss 2024] constraint-aware intent estimation for dynamic human-robot object co-manipulation
-
 1:22
1:22
vs hva series :1.1"&2.74µm support compact fixed focal length lenses.