minitaur quadruped reinforcement learned gait (ppo)
Published 7 years ago • 983 plays • Length 0:21Download video MP4
Download video MP3
Similar videos
-
 0:12
0:12
minitaur pybullet trained with tf agents ppo, improved motor model, randomization
-
 0:19
0:19
transfer learning from pybullet to real minitaur
-
 0:11
0:11
ppo reinforcement learning trained minitaur gait
-
 0:11
0:11
deep reinforcement learning of symbiotic locomotion
-
 0:15
0:15
deep reinforcement learning of symbiotic locomotion (v2)
-
 0:10
0:10
physics simulation of the minitaur quadruped (ghost robotics) using bullet physics (pybullet)
-
 0:34
0:34
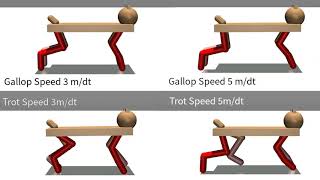
deep reinforcement learning with gait mode specification for quadrupedal trot-gallop energetic study
-
 1:41
1:41
learning to walk in the real world in 1 hour (no simulator)
-
 9:56
9:56
quadruped locomotion
-
 0:33
0:33
viability leads to the emergence of gait transitions in learning locomotion (nature communications)
-
 0:07
0:07
minitaur locomotion in pybullet, trained with ars linear policy in 30 minutes ( reflection)
-
 0:23
0:23
simplest stalking quadruped gait (vision 60, pybullet)
-
 1:22
1:22
quadruped robot simulation in gazebo - trot gait controller
-
 0:06
0:06
atlas reinforcement learning pybullet environment
-
 0:26
0:26
quadruped locomotion in sim on uneven terrain (spirit40, mpc)
-
 0:23
0:23
minitaur pybullet td3 reinforcement learning
-
 0:46
0:46
real minitaur robot log, play back using pybullet
-
 3:37
3:37
privileged reinforcement learning for quadrupedal robots, part 3 (final report demo)
-
 1:23
1:23
four stages of minitaur training
-
 0:17
0:17
pybullet ant trained using tensorflow agents