model predictive control with environment adaptation for legged locomotion
Published 2 years ago • 1.5K plays • Length 4:11Download video MP4
Download video MP3
Similar videos
-
 3:00
3:00
mpc-based controller with terrain insight for dynamic legged locomotion
-
![accelerating model predictive control for legged robots through distributed optimization [iros 2024]](https://i.ytimg.com/vi/Yar4W-Vlh2A/mqdefault.jpg) 1:01
1:01
accelerating model predictive control for legged robots through distributed optimization [iros 2024]
-
 6:57
6:57
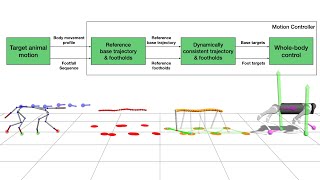
animal motions on legged robots using nonlinear model predictive control - iros 2022 presentation
-
![on the benefits of gpu sample-based stochastic predictive controllers for legged locomotion [iros24]](https://i.ytimg.com/vi/E4iz9fZsfxA/mqdefault.jpg) 1:00
1:00
on the benefits of gpu sample-based stochastic predictive controllers for legged locomotion [iros24]
-
 2:34
2:34
animal motions on legged robots using nonlinear model predictive control - supplementary
-
 9:10
9:10
perceptive locomotion through nonlinear model predictive control
-
 2:00
2:00
multi-layered safety for legged robots via control barrier functions and model predictive control
-
 3:29
3:29
optimization-based reference generator for nonlinear model predictive control of legged robots
-
 1:21
1:21
animal motions on legged robots using nonlinear model predictive control - teaser
-
 1:23
1:23
bipedal locomotion with nonlinear model predictive control
-
 3:35
3:35
multi-expert learning of adaptive legged locomotion
-
![[icra'20 presentation] mpc-based controller with terrain insight for dynamic legged locomotion](https://i.ytimg.com/vi/eBkQOGq7_Jo/mqdefault.jpg) 9:42
9:42
[icra'20 presentation] mpc-based controller with terrain insight for dynamic legged locomotion
-
 0:59
0:59
real-time constrained nonlinear model predictive control on so(3) for dynamic legged locomotion
-
 3:15
3:15
terrain-adaptive, alip-based bipedal locomotion controller via mpc and virtual constraints-extended
-
 2:57
2:57
contact model fusion for event-based locomotion in unstructured terrains
-
 0:59
0:59
real-time constrained nonlinear model predictive control on so3 for dynamic legged locomotion
-
 1:28
1:28
extracting legged locomotion heuristics with regularized predictive control
-
 3:36
3:36
learning a contact-adaptive controller for robust, efficient legged locomotion