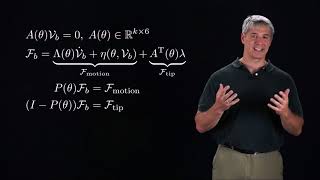
modern robotics, chapter 12.2.4: duality of force and motion freedoms
Published 6 years ago • 1.7K plays • Length 3:33Download video MP4
Download video MP3
Similar videos
-
 5:39
5:39
modern robotics, chapter 12.2.1: friction
-
 4:56
4:56
modern robotics, chapter 12: grasping and manipulation
-
 4:05
4:05
modern robotics, chapter 12.2.3: force closure
-
 6:42
6:42
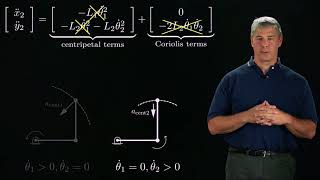
modern robotics, chapter 8.1: lagrangian formulation of dynamics (part 1 of 2)
-
 14:22
14:22
modern robotics course: introduction
-
 0:46
0:46
3d printed controllable prosthetic hand via emg
-
 21:03
21:03
my new linear actuators are so much better! | pdj #21
-
 4:03
4:03
modern robotics, chapter 12.2.2: planar graphical methods
-
 4:44
4:44
modern robotics, chapter 10.2: c-space obstacles
-
 5:27
5:27
modern robotics, chapter 11.6: hybrid motion-force control
-
 5:43
5:43
modern robotics, chapter 2.2: degrees of freedom of a robot
-
 5:42
5:42
modern robotics, chapter 12.1.2: contact types: rolling, sliding, and breaking
-
 5:15
5:15
modern robotics, chapter 2.1: degrees of freedom of a rigid body
-
 3:52
3:52
modern robotics, chapter 2.3.2: configuration space representation
-
 5:36
5:36
modern robotics, chapter 8.1: lagrangian formulation of dynamics (part 2 of 2)
-
 5:00
5:00
modern robotics, chapter 3.3.2: twists (part 1 of 2)
-
 6:13
6:13
modern robotics, chapter 8.2: dynamics of a single rigid body (part 1 of 2)