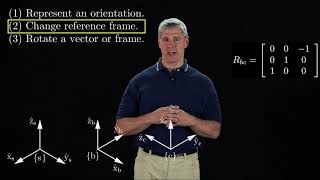
modern robotics, chapter 3.2.1: rotation matrices (part 1 of 2)
Published 7 years ago • 62K plays • Length 2:54Download video MP4
Download video MP3
Similar videos
-
 4:14
4:14
modern robotics, chapter 3.2.1: rotation matrices (part 2 of 2)
-
 2:04
2:04
modern robotics, chapter 3.2.3: exponential coordinates of rotation (part 1 of 2)
-
 5:59
5:59
quaternions and 3d rotation, explained interactively
-
 18:22
18:22
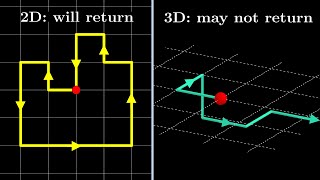
random walks in 2d and 3d are fundamentally different (markov chains approach)
-
 22:01
22:01
robotics 1 u1 (kinematics) s3 (rotation matrices) p1 (rotation matrices)
-
 3:43
3:43
modern robotics, chapter 3.2.3: exponential coordinates of rotation (part 2 of 2)
-
 5:00
5:00
modern robotics, chapter 3.3.2: twists (part 1 of 2)
-
 6:22
6:22
modern robotics, chapter 3.3.1: homogeneous transformation matrices
-
 13:29
13:29
1 1 3 lecture video 2 of 4 explanation of rotation matrices
-
 9:01
9:01
robotic systems. rotation matrix. | | upv
-
 22:12
22:12
robotics 2 u3 (motion control) s1 (steppers) p1 (theory)
-
 2:10
2:10
modern robotics, chapter 3: introduction to rigid-body motions