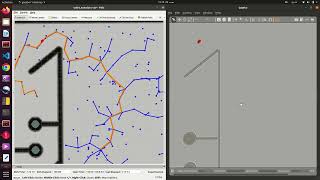
motion planning: rapidly exploring random trees (rrt): algorithm implementation step by step!
Published 2 years ago • 15K plays • Length 27:51Download video MP4
Download video MP3
Similar videos
-
![rapidly-exploring random tree [rrt] algorithm implementation in python | robotics](https://i.ytimg.com/vi/tkFcxvNSOoI/mqdefault.jpg) 4:49
4:49
rapidly-exploring random tree [rrt] algorithm implementation in python | robotics
-
 17:55
17:55
path planning with a* and rrt | autonomous navigation, part 4
-
 0:16
0:16
python implementation of rapidly exploring random trees
-
 12:36
12:36
introduction to motion planning algorithms | motion planning with the rrt algorithm, part 1
-
 15:54
15:54
a rapidly exploring random trees motion planning algorithm for hybrid dynamical systems
-
 1:16
1:16
how to scare c programmer
-
 2:04
2:04
dynamic rrt
-
 38:41
38:41
rapidly exploring random topics
-
 0:37
0:37
rapidly exploring random trees (rrt) algorithm in ros
-
 11:14
11:14
rrt, rrt* & random trees
-
 0:11
0:11
rapidly-exploring random trees algorithm demo
-
 3:14
3:14
rapidly-exploring random tree (rrt) motion planner for robotic arm
-
 0:52
0:52
rapidly exploring random tree path planning algorithm | with dynamic constraints | python opencv
-
 13:34
13:34
the rrt path planning algorithm simulated with python | part 1
-
 8:30
8:30
rapidly-exploring random tree (rrt) algorithm for mobile robot
-
![motion planning algorithms (rrt, rrt*, prm) - [mit 6.881 final project]](https://i.ytimg.com/vi/gP6MRe_IHFo/mqdefault.jpg) 5:41
5:41
motion planning algorithms (rrt, rrt*, prm) - [mit 6.881 final project]
-
 14:44
14:44
randomly exploring random trees - rrt
-
 0:23
0:23
rapidly-exploring random tree (rrt) --- the flange problem
-
 5:10
5:10
the rrt path planning algorithm simulated with python | part 4
-
 2:32
2:32
rapidly-exploring random trees (rrt) motion planning: ros
-
 0:30
0:30
rapidly exploring random tree path planning algorithm | python opencv
-
 13:25
13:25
human aware robot motion planning using rrt algorithm in industry 4.0