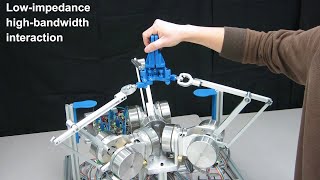
whole-body intuitive phri with flexible robots using non-collocated proprioceptive sensing
Published 8 months ago • 982 plays • Length 1:36Download video MP4
Download video MP3
Similar videos
-
 1:09
1:09
backdrivable kinematically redundant (6 3)-dof hybrid parallel robot – part 1: trajectory control
-
 2:36
2:36
a backdrivable 6-dof parallel robot for sensorless dynamically interactive tasks
-
 19:58
19:58
cnc machined vs 3d printed cycloidal drive
-
 11:22
11:22
spm - 3d printed spherical parallel manipulator assembly
-
 17:08
17:08
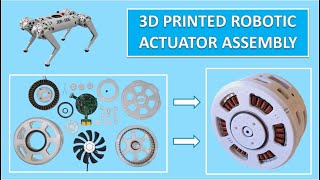
3d printed robot actuator assembly
-
 0:27
0:27
motion control of kinematically redundant hybrid parallel robots
-
 3:10
3:10
synthesis, dynamic modeling, prototyping andcontrol of a handheld rotational inertia generator
-
 1:09
1:09
dynamic modeling, trajectory planning and prototyping of an ice-skating robot
-
 3:07
3:07
backdrivable kinematically redundant (6 3)-dof hybrid parallel robot –part 2:human–robot interaction
-
 8:44
8:44
code chastenay : the laval university robotics laboratory
-
 1:02
1:02
hybrid control contacts
-
 2:40
2:40
model based grasping of unknown objects from a random pile
-
 1:54
1:54
singularity-free kinematically redundant planar parallel mechanism
-
 3:02
3:02
prompt : actual use of the prompt robot (campus ulaval)