pieter abbeel on building a foundation model for robotic piece-picking
Published 1 year ago • 1.3K plays • Length 1:45Download video MP4
Download video MP3
Similar videos
-
 1:06:17
1:06:17
s3 e12 rocky duan, from openai to covariant: building foundation models for robotic automation
-
 51:21
51:21
season 1 ep 1 foundations of deep reinforcement learning with pieter abbeel
-
 3:00
3:00
the future of humanity: a.i predicts 400 years in 3 minutes (4k)
-
 11:36
11:36
pieter abbeel - really quick questions with a berkeley professor
-
 10:55
10:55
learn how to build a full size robot.
-
 0:58
0:58
pieter abbeel explains our approach to building our #generalizedai at @fortune’s brainstorm #ai
-
 1:08
1:08
how generalized ai outperforms specialized models
-
 37:24
37:24
keynote address: robotics ai (pieter abbeel)
-
 42:01
42:01
berkeley eecs research symposium bears 2023 - future of robotics pieter abbeel & joey gonzalez
-
 28:56
28:56
pieter abbeel: paving the path to generalizable robotics | transformx 2022
-
 1:53
1:53
deep learning robot projects - pieter abbeel | open data science conference
-
 0:30
0:30
covariant robot moves items for better picking
-
 34:30
34:30
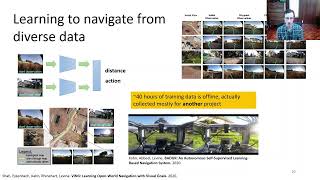
a general-purpose robotic navigation model
-
 0:14
0:14
ai robots taking over ping pong 👀 #shorts
-
 0:48
0:48
the role of robotics at capacity