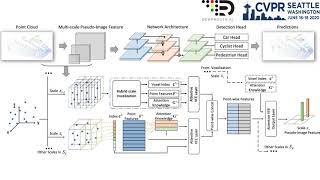
pv-rcnn: point-voxel feature set abstraction for 3d object detection
Published 4 years ago • 1.8K plays • Length 1:01Download video MP4
Download video MP3
Similar videos
-
 0:24
0:24
lidar based 3d object detection using pv-rcnn
-
![[neurips 2019 spotlight] point-voxel cnn for efficient 3d deep learning](https://i.ytimg.com/vi/TyGfid36XZ4/mqdefault.jpg) 4:48
4:48
[neurips 2019 spotlight] point-voxel cnn for efficient 3d deep learning
-
 5:53
5:53
point voxel cnn for efficient 3d deep learning, neurips 2019, spotlight presentation.
-
 4:00
4:00
dense voxel fusion for 3d object detection
-
 1:00
1:00
hvnet: hybrid voxel network for lidar based 3d object detection
-
 26:32
26:32
point-voxel cnn for efficient 3d deep learning(pvcnn), zhijian liu (mit eecs)
-
![elon musk says losers use lidar. [explanation video]](https://i.ytimg.com/vi/BFdWsJs6z4c/mqdefault.jpg) 6:53
6:53
elon musk says losers use lidar. [explanation video]
-
 28:06
28:06
explainable computer vision with grad-cam
-
 5:36
5:36
visual localization in 3d maps: comparing point cloud, mesh, and nerf representations
-
 13:08
13:08
3d point cloud registration for localization using a deep neural network auto-encoder
-
 36:27
36:27
voxelnet: end-to-end learning for point cloud based 3d object (paper explained)
-
 1:01
1:01
pointpainting: sequential fusion for 3d object detection
-
 0:11
0:11
super fast and accurate 3d object detection based on 3d lidar point clouds
-
 4:51
4:51
imvoxelnet: image to voxels projection for monocular and multi-view general-purpose 3d object detec
-
 4:38
4:38
point-dynrf: point-based dynamic radiance fields from a monocular video
-
 0:46
0:46
3d detection with pvcnn