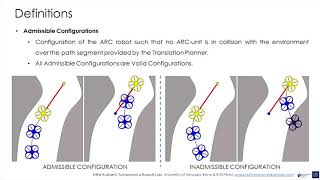
risk-aware motion planning for collision-tolerant aerial robots subject to uncertainty
Published 2 years ago • 9.7K plays • Length 1:00Download video MP4
Download video MP3
Similar videos
-
 8:29
8:29
iros2022 talk: risk-aware motion planning for collision-tolerant aerial robots s.t. uncertainty
-
 16:18
16:18
autonomous exploration path planning in high-risk environments using aerial robots
-
 11:04
11:04
icra2021: resilient collision-tolerant navigation in confined environments
-
 2:59
2:59
semantics-aware exploration and inspection path planning
-
 14:01
14:01
ifac2020 pitch: the reconfigurable aerial robotic chain: shape and motion planning
-
 3:54
3:54
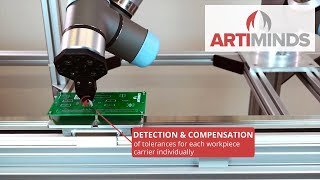
compensation of tolerances & process optimization in robotic applications using artiminds lar
-
 3:05
3:05
autonomous distributed radiation field characterization and informative planning: experiment #3
-
 1:41
1:41
the reconfigurable aerial robotic chain: shape and motion planning
-
 2:32
2:32
autonomous distributed radiation field characterization and informative planning: experiment #1
-
 1:21
1:21
uncertainty-aware receding horizon exploration and mapping using aerial robots
-
 1:31
1:31
visual saliency-aware receding horizon autonomous exploration with application to aerial robotics
-
 1:00
1:00
mimosa: a multi-modal slam framework for resilient autonomy against sensor degradation
-
 1:07
1:07
autonomous exploration inside building corridors
-
 3:37
3:37
realtime's autonomous vehicle risk aware motion planning