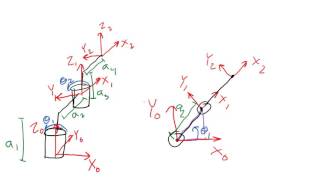
robotics 1 u1 (kinematics) s2 (kinematic diagrams) p4 (spherical wrist)
Published 7 years ago • 16K plays • Length 13:30Download video MP4
Download video MP3
Similar videos
-
 53:50
53:50
robotics 1 u1 (kinematics) s2 (kinematic diagrams) p1 (denavit-hartenberg frames)
-
 28:52
28:52
robotics 1 u1 (kinematics) s2 (kinematic diagrams) p3 (examples)
-
 36:41
36:41
robotics 1 u1 (kinematics) s2 (kinematic diagrams) p2 (set the angles of servos)
-
 46:13
46:13
robotics 1 u1 (kinematics) s6 (inverse kinematics) p1 (inverse kinematics)
-
 22:01
22:01
robotics 1 u1 (kinematics) s3 (rotation matrices) p1 (rotation matrices)
-
 17:15
17:15
robotics 1 u1 (kinematics) s4 (displacement vectors) p2 (displacement vector examples)
-
 31:45
31:45
2 1 1 lab video 1 of 1 spherical wrist
-
 3:49
3:49
spherical parallel manipulator
-
 22:16
22:16
robotics 1 u1 (kinematics) s1 (preliminaries) p2 (soldering and kit assembly)
-
 5:49
5:49
easy inverse kinematics for robot arms
-
 30:16
30:16
robotics 1 u1 (kinematics) s5 (htm) p2 (htm by denavit hartenberg)
-
 12:05
12:05
robotics 1 u1 (kinematics) s1 (preliminaries) p3 (install software)
-
 25:57
25:57
robotics 1 u1 (kinematics) s6 (inverse kinematics) p2 (3-dof inverse kinematics)
-
 34:10
34:10
robotics 1 u1 (kinematics) s3 (rotation matrices) p4 (6-dof example and error checking)
-
 7:12
7:12
robotics 1 u1 (kinematics) s4 (displacement vectors) p3 (displacement vectors in python)
-
 15:38
15:38
robotics 1 u1 (kinematics) s4 (displacement vectors) p1 (displacement vectors)
-
 17:01
17:01
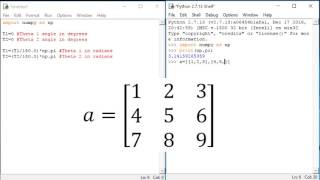
robotics 1 u1 (kinematics) s3 (rotation matrices) p2 (rotation matrices in python)
-
 42:55
42:55
robotics 1 u1 (kinematics) s1 (preliminaries) p4 (first psoc (c) code)