ros 2 and zenoh – from zero to deployment
Published 10 months ago • 1.9K plays • Length 45:18Download video MP4
Download video MP3
Similar videos
-
 20:39
20:39
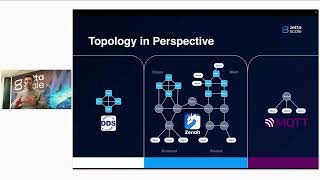
zenoh: how to make ros 2 work at any scale and integrate with anything
-
 1:13:25
1:13:25
zenoh ros 2 rmw and ros 2 plugin – when to use what?
-
 57:36
57:36
zenoh and ros2 - overcome dds limitations with zenoh's dds plugin and dds bridge for robotic systems
-
 17:40
17:40
actuate 2024 | chris lalancette | zenoh and ros 2: not a paradox
-
 4:12
4:12
zenoh explained
-
 10:25
10:25
mobile gateways for ros2 systems with zenoh
-
 11:12
11:12
improving the communications layer of robot applications with ros 2 and zenoh
-
 1:08:01
1:08:01
zenoh tutorial – part i
-
 7:03
7:03
ros2 zenoh
-
 2:41
2:41
ros communication between two different computers
-
 23:44
23:44
new project eclipse zenoh flow
-
 9:28
9:28
ultimate fps unlock for space marine 2 on steam deck / linux
-
 1:32:51
1:32:51
rdp119: zenoh for ros2
-
 1:17:56
1:17:56
understanding zenoh
-
 29:50
29:50
edge robotics with ros2 and eclipse zenoh
-
 42:11
42:11
zenoh: a crash course in building cloud- to-microcontroller applications
-
 1:18:42
1:18:42
zetta and ros 2 – giving unconstrained connectivity to your robots
-
 1:30
1:30
how to enable or disable graphics acceleration on the chromium browser (ubuntu tutorial)
-
 10:50
10:50
run ros2 on multiple machines (ros_domain_id explained)
-
 1:01:55
1:01:55
integrating databases and messaging protocols with zenoh | simplifying cloud applications
-
 1:00
1:00
alternate rmw for ros 2 | zenoh #zenoh #ros2 #dds #raspberrypi #ai #sensors #robotoperatingsystem
-
 18:32
18:32
how to set up bolt.new on windows open source bolt.new updates