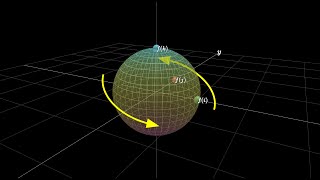
screws: a geometric description of twists in robotics | fundamentals of robotics | lesson 17
Published 2 years ago • 48K plays • Length 24:43Download video MP4
Download video MP3
Similar videos
-
 16:48
16:48
screw motion and exponential coordinates of robot motions | fundamentals of robotics | lesson 15
-
 32:12
32:12
velocities in robotics: angular velocities & twists | fundamentals of robotics | lesson 16
-
 7:36
7:36
screw theory: applications and importance | fundamentals of robotics | lesson 15
-
 28:37
28:37
exponential coordinates in robotics | fundamentals of robotics | lesson 9
-
 30:46
30:46
rotation matrices in robotics | fundamentals of robotics | lesson 8
-
 5:59
5:59
quaternions and 3d rotation, explained interactively
-
 2:35:57
2:35:57
prof.kenneth h. hunt-screw theory and robotics
-
 19:20
19:20
building a self-balancing robot | part 1 - mechanics
-
 25:06
25:06
forward kinematics in robotics using screw theory matlab code & great demos | lesson 19
-
 1:48
1:48
vision‐aided screw theory-based numerical inverse kinematics of the robot arm challenge #2
-
 4:02
4:02
defining robotics | lesson 1 | robotics | fuseschool
-
 13:10
13:10
fundamentals of robotics: wrenches | lesson 18
-
 0:52
0:52
vision‐aided screw theory-based numerical inverse kinematics of the robot arm challenge #3
-
 12:43
12:43
cayley-rodrigues parameters in robotics | fundamentals of robotics | lesson 13
-
 6:57
6:57
lecture 1c - 4.3: composition of rotations (robotics utec 2018-1)
-
 0:52
0:52
a tiny robot that could perform surgery: future of medicine is here