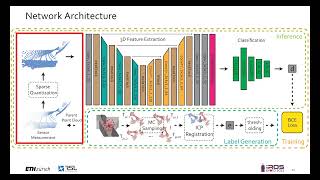
self-supervised learning of lidar odometry for robotic applications (icra 2021 presentation)
Published 3 years ago • 5.1K plays • Length 13:01Download video MP4
Download video MP3
Similar videos
-
 2:59
2:59
self-supervised learning of lidar odometry for robotic applications (supplementary)
-
 9:42
9:42
safe robot navigation via multi-modal anomaly detection
-
 9:53
9:53
learning-based localizability estimation for robust lidar localization: iros22 best paper award talk
-
 3:21
3:21
design and motion planning for a reconfigurable robotic base
-
 1:45
1:45
where should i walk? predicting terrain properties from images via self-supervised learning
-
 3:00
3:00
viplanner: visual semantic imperative learning for local navigation (icra 2024)
-
 12:05
12:05
"self-supervised learning of lidar segmentation for autonomous indoor navigation" @ icra 2021
-
 3:00
3:00
reconstructing occluded elevation information in terrain maps with self-supervised learning
-
 4:29
4:29
x-icp: localizability-aware lidar registration for robust localization in extreme environments(sup.)
-
 2:25
2:25
learning risk-aware locomotion (icra 2024)
-
 12:30
12:30
machine learning on arduino uno was a good idea
-
 1:00
1:00
learning-based localizability estimation for robust lidar localization (supplementary)