stanford seminar - computational design of compliant, dynamical robots, cynthia sung
Published 2 years ago • 1.1K plays • Length 56:00Download video MP4
Download video MP3
Similar videos
-
 55:10
55:10
mit robotics - cynthia sung - computational design of origami and compliant robots
-
 47:56
47:56
stanford seminar - when design = planning
-
 1:06:53
1:06:53
autonomy talks - cynthia sung: computational design of compliant, dynamical robots
-
 52:41
52:41
stanford seminar - multimaterial design for multifunctional miniature robots
-
 48:36
48:36
stanford seminar - humanizing robot design, aaron edsinger of hello robot
-
 4:50
4:50
meet mimus, the curious industrial robot
-
 2:34
2:34
drone loading robot and more from stanford experimental robotics
-
 2:36
2:36
new devices morph and transform - like iron man's suit
-
 58:06
58:06
stanford seminar - democratizing robot learning
-
 1:00:31
1:00:31
stanford seminar - objects, skills, and the quest for compositional robot autonomy
-
 1:05:52
1:05:52
stanford seminar - from open-source to safety-certified robotic software
-
 56:05
56:05
stanford seminar - the next generation of robot learning
-
 49:29
49:29
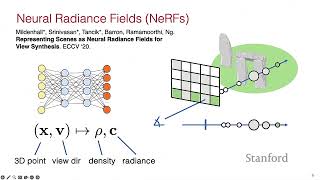
stanford seminar - perception-rich robot autonomy with neural environment models
-
 45:59
45:59
stanford seminar - human-in-the-loop computational design
-
 52:02
52:02
stanford seminar - field-hardened robotic autonomy
-
 47:44
47:44
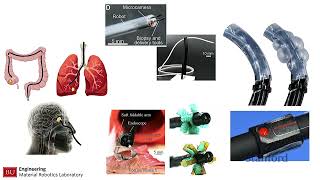
stanford seminar - soft material robotics and next-generation surgical robots