talk by f. magistri: 3d shape completion and reconstruction for agricultural robots (ral-iros'22)
Published 2 years ago • 2.1K plays • Length 9:08Download video MP4
Download video MP3
Similar videos
-
 6:50
6:50
talk by ignacio vizzo: make it dense - dense maps from sparse point clouds (ral-iros'22)
-
 4:50
4:50
talk by y. pan: panoptic mapping with fruit completion and pose estimation ... (iros'23)
-
 1:27
1:27
a hybrid bionic spherical robot -tumbelbot ieee ral and iros 2022
-
 1:51
1:51
trailer: efficient and accurate transformer-based 3d shape completion and reconstruction of fruits..
-
 3:00
3:00
3dsgrasp: 3d shape-completion for robotic grasp
-
 5:01
5:01
iros 2023 presentation: dexterous soft hands linearize feedback-control for in-hand manipulation
-
 1:42
1:42
revolutionizing beef scribing with automation! latest 3d vision & ai robotics technology explained"
-
 6:59
6:59
talk by y. pan: voxfield: non-projective signed distance fields (iros'22)
-
 7:00
7:00
talk by j. rückin: informative path planning for active learning in aerial semantic map... (iros'22)
-
 0:08
0:08
elon musk protected by his humanoid robot bodyguard eyes
-
 15:00
15:00
animal gaits on quadrupedal robots using motion matching and model based control - iros 2021 talk
-
 7:42
7:42
barry mulvey’s deformobot paper presentation at iros 2023
-
 1:08
1:08
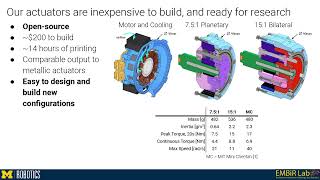
iros 2022 design and characterization of 3d printed, open-source actuators for legged locomotion
-
 4:16
4:16
(iros 2023) proprioceptive external torque learning for floating base robot
-
 11:00
11:00
talk by x. chen on learning an overlap-based observation model for 3d lidar localization (iros'20)
-
 6:57
6:57
iros-22 talk: robot contact reflexes: adaptive maneuvers in the contact reflex space