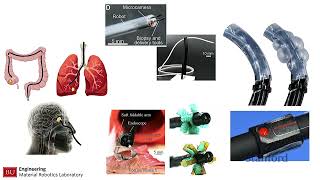
toward force estimation in robot-assisted surgery using deep learning with vision and robot state
Published 3 years ago • 596 plays • Length 12:16Download video MP4
Download video MP3
Similar videos
-
 1:41
1:41
stanford space robotics facility: overview and capabilities
-
 0:30
0:30
sensorless grip force estimation for robotic surgery
-
 47:44
47:44
stanford seminar - soft material robotics and next-generation surgical robots
-
 2:04
2:04
stanford space robotics facility: autonomous docking
-
 11:12
11:12
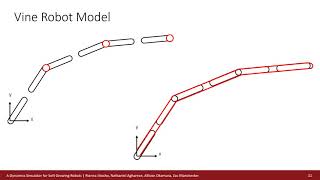
a dynamics simulator for soft growing robots
-
 0:54
0:54
using robot touch to feel objects - demonstration of deep learning for tactile sensing
-
 0:24
0:24
proact: sequential end-effector control of a virtual prosthetic arm
-
 5:01
5:01
guide: real-time human-shaped agents
-
 2:27
2:27
functional optimization based approach for continuous 3d retargeted touch in haptic virtual reality
-
 1:10
1:10
dynamic contact force estimation via integration of soft sensor based on fbg and sea
-
 4:21
4:21
cambridge research haptic surgery
-
 1:08
1:08
shiftio: reconfigurable tactile elements for dynamic affordances and mobile interaction
-
 2:24
2:24
fas robotics autonomy lab
-
 1:17
1:17
robots for humanity: henry evans teleoperating a pr2 with whole-arm tactile sensing