6 axis robot forward & inverse kinematics tutorial - denavit hartenberg parameters with the ar4-mk2
Published 9 months ago • 30K plays • Length 1:41:55Download video MP4
Download video MP3
Similar videos
-
 3:01
3:01
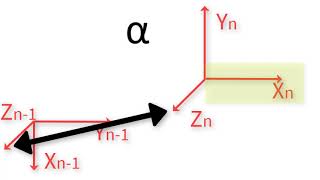
denavit-hartenberg reference frame layout
-
 9:41
9:41
inverse kinematics of robots | robotics 101
-
 3:57
3:57
dh convention of rpp manipulator
-
 22:16
22:16
intro2robotics lecture 5b: forward kinematics examples
-
 14:04
14:04
6 axis robot kinematics part 2
-
 1:10:19
1:10:19
analytical forward and inverse kinematics for stanford arm
-
 12:46
12:46
2 1 2 lecture video 3 of 4 denavit hartenberg coordinate frames
-
 15:19
15:19
robotics 2 u1 (kinematics) s2 (denavit-hartenberg) p3 (parameter table)
-
 5:51
5:51
inverse kinematics. explaining every step
-
 51:59
51:59
sysc 4206 lecture 7: inverse kinematics 2, 6dof robot arm with spherical wrist
-
 26:43
26:43
2.12 robotics || ese mains 2018 || scara robot: dh parameters and position vector in the space
-
 58:52
58:52
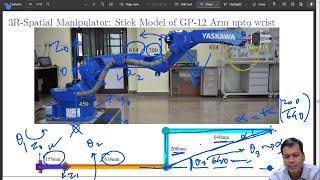
inverse kinematics of a 6-dof industrial robot (yaskawa gp12)
-
 1:02:33
1:02:33
dh parameters with forward and inverse kinematics
-
 10:25
10:25
video tutorial on forward kinematic for rpr robot
-
 26:19
26:19
robotics 2 u1 (kinematics) s5 (inverse kinematics) p2 (procedure and programming)
-
 3:28
3:28
modern robotics, chapter 4: forward kinematics example