robotics 2 u1 (kinematics) s5 (inverse kinematics) p2 (procedure and programming)
Published 6 years ago • 109K plays • Length 26:19Download video MP4
Download video MP3
Similar videos
-
 30:16
30:16
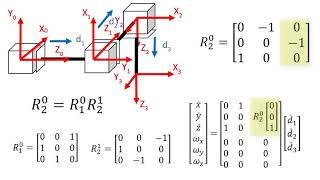
robotics 1 u1 (kinematics) s5 (htm) p2 (htm by denavit hartenberg)
-
 13:09
13:09
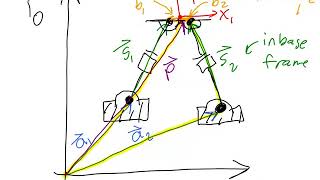
robotics 2 u1 (kinematics) s6 (parallel manipulators) p2 (inverse kinematics)
-
 6:41
6:41
robotics 2 u1 (kinematics) s6 (parallel manipulators) p1 (introduction)
-
 15:21
15:21
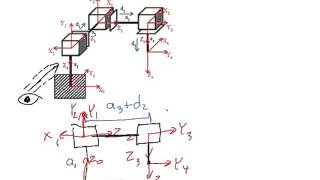
robotics 2 u1 (kinematics) s2 (denavit-hartenberg) p2 (frames)
-
 9:41
9:41
inverse kinematics of robots | robotics 101
-
 46:13
46:13
robotics 1 u1 (kinematics) s6 (inverse kinematics) p1 (inverse kinematics)
-
 25:57
25:57
robotics 1 u1 (kinematics) s6 (inverse kinematics) p2 (3-dof inverse kinematics)
-
 5:04
5:04
modern robotics, chapter 6.2: numerical inverse kinematics (part 1 of 2)
-
 21:28
21:28
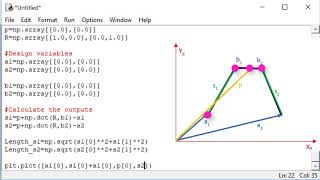
robotics 2 u1 (kinematics) s6 (parallel manipulators) p4 (python simulation)
-
 23:29
23:29
1 1 6 lecture video 1 of 2 intro to inverse kinematics and example
-
 16:41
16:41
robotics 2 u1 (kinematics) s3 (jacobian matrix) p2 (finding the jacobian)