amortized q-learning with model-based action proposals for autonomous driving on highways
Published 3 years ago • 207 plays • Length 3:03Download video MP4
Download video MP3
Similar videos
-
 5:43
5:43
autonomous navigation of unmanned vehicle through deep reinforcement learning - arxiv:24
-
 5:33
5:33
deep q learning explained - making a self-driving car (part 1)
-
 4:04
4:04
performance, precision, and payloads: adaptive nonlinear mpc for quadrotors (ral 2021)
-
![[icra21 autonomous racing] - ugo rosolia (caltech) - learning to race using a predictive control](https://i.ytimg.com/vi/hC9FbAerr00/mqdefault.jpg) 18:36
18:36
[icra21 autonomous racing] - ugo rosolia (caltech) - learning to race using a predictive control
-
![[icra21 autonomous racing] - panagiotis tsiotras (g. tech): modeling and control design for racing](https://i.ytimg.com/vi/1Bt8I4goYy8/mqdefault.jpg) 24:03
24:03
[icra21 autonomous racing] - panagiotis tsiotras (g. tech): modeling and control design for racing
-
 2:39
2:39
learning-based model predictive control for autonomous racing
-
 15:31
15:31
reinforcement learning with human feedback for realistic traffic simulation - arxiv:2309
-
 2:16
2:16
uncertainty-driven imagination for continuous deep reinforcement learning (corl 2017)
-
 53:20
53:20
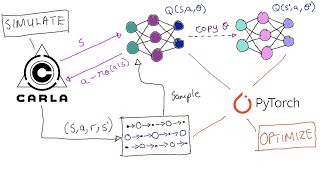
self driving with carla - part 1: steering with deep q learning networks