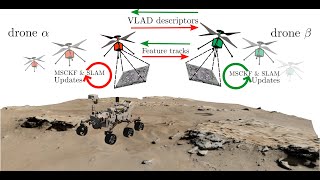
data-efficient decentralized visual slam (icra18 video teaser)
Published 6 years ago • 4.4K plays • Length 2:53Download video MP4
Download video MP3
Similar videos
-
 6:50
6:50
data-efficient collaborative decentralized thermal-inertial odometry (ral-iros 2022)
-
 2:53
2:53
data-efficient decentralized visual slam
-
 3:01
3:01
ultimate slam? combining events, images, and imu for visual slam in hdr and high-speed scenarios
-
 3:48
3:48
continuous-time vs. discrete-time vision-based slam: a comparative study (ra-l 2022)
-
 2:43
2:43
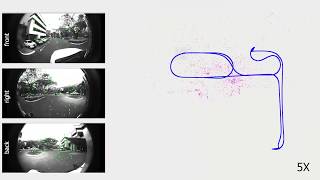
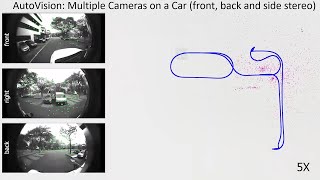
redesigning slam for arbitrary multi-camera systems
-
 3:01
3:01
perception-aware receding horizon navigation for mavs
-
 4:37
4:37
the hilti slam challenge dataset (ral-iros 2022)
-
 4:11
4:11
fisher information field: an efficient and differentiable map for perception-aware planning
-
 6:15
6:15
redesigning slam for arbitrary multi-camera systems
-
 1:30
1:30
visual slam – production flows
-
 3:05
3:05
event-based vision for autonomous high-speed robotics
-
 1:40
1:40
autonomous, live, dense 3d mapping of an outdoor mock-up disaster zone with a quadrotor mav
-
 1:02
1:02
2d / 3d dual slam robot using ros and lidar with raspberry pi
-
 3:03
3:03
real-time visual-inertial odometry for event cameras using keyframe-based nonlinear optimization
-
 3:37
3:37
e-raft: dense optical flow from event cameras (3dv 2021)
-
 3:04
3:04
evo: event-based visual odometry (ral'17)