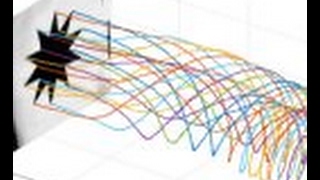
real-time visual-inertial odometry for event cameras using keyframe-based nonlinear optimization
Published 6 years ago • 46K plays • Length 3:03Download video MP4
Download video MP3
Similar videos
-
 6:31
6:31
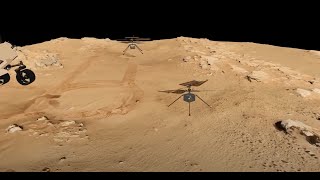
exploring event camera-based odometry for planetary robots (ral-iros 2022)
-
 0:56
0:56
benefit of large field-of-view cameras for visual odometry
-
 2:57
2:57
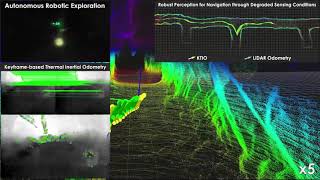
keyframe-based direct thermal-inertial odometry
-
 0:49
0:49
the event-camera dataset and simulator
-
 8:59
8:59
pl-evio: robust monocular event-based visual inertial odometry with point and line features
-
 5:20
5:20
vimo: simultaneous visual inertial model-based odometry and force estimation (rss 2019)
-
 1:02
1:02
event-based, direct camera tracking from a photometric 3d map using nonlinear optimization (icra'19)
-
 3:23
3:23
high speed and high dynamic range video with an event camera
-
 1:00
1:00
low-latency visual odometry using event-based feature tracks
-
 3:07
3:07
emvs: event-based multi-view stereo - 3d reconstruction with an event camera in real-time
-
 0:28
0:28
feature detection and tracking with the dynamic and active pixel vision sensor davis
-
 3:16
3:16
event camera visual odometry for dynamic motion tracking of a legged robot by adaptive time surface
-
 4:13
4:13
multi camera visual inertial odometry - lintong zhang #icra2022
-
 4:44
4:44
keyframe-based thermal-inertial odometry
-
 3:07
3:07
direct visual-inertial odometry with stereo cameras