deepvl: dynamics and inertial measurements-based deep velocity learning for underwater odometry
Published 1 month ago • 3.8K plays • Length 3:00Download video MP4
Download video MP3
Similar videos
-
 2:49
2:49
vid-fusion: robust visual-inertial-dynamics odometry
-
 2:58
2:58
degradation resilient lidar-radar-inertial odometry
-
 2:49
2:49
vid-fusion: robust visual-inertial-dynamics odometry for accurate external force estimation
-
 1:51
1:51
visual-thermal landmarks and inertial fusion for navigation in degraded visual environments
-
 4:58
4:58
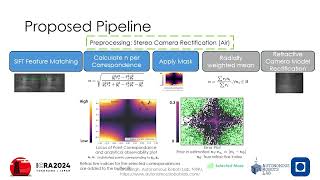
icra2024 talk: an online self-calibrating refractive camera model with appl. to underwater odometry
-
 4:24
4:24
learning inertial odometry for dynamic legged robot state estimation
-
 2:19
2:19
resource-aware online parameter adaptation for computationally-constrained visual-inertial odometry
-
 5:20
5:20
vimo: simultaneous visual inertial model-based odometry and force estimation (rss 2019)
-
 16:53
16:53
dynamics: transverse and radial components of velocity and acceleration
-
 21:45
21:45
tinyml research symposium 2022: imu preintegrated features for efficient deep inertial odometry
-
![[icra 2021] robust underwater visual slam fusing acoustic sensing](https://i.ytimg.com/vi/1V77WicHVCk/mqdefault.jpg) 1:58
1:58
[icra 2021] robust underwater visual slam fusing acoustic sensing
-
 7:01
7:01
iros2022 talk:mimosa: a multi-modal slam framework for resilient autonomy against sensor degradation
-
 1:10:05
1:10:05
search of efficient and accurate models for transient dynamics and energy amplification mechanisms
-
 2:26
2:26
robust thermal-inertial localization for aerial robots: a case for direct methods
-
 3:30
3:30
real-time monocular visual odometry for turbid and dynamic underwater environments - #5
-
 1:01
1:01
comparison of open source visual-inertial-based state estimation algorithms in the underwater domain
-
 1:28
1:28
vision-depth landmarks and inertial fusion for navigation in degraded visual environments