vimo: simultaneous visual inertial model-based odometry and force estimation (rss 2019)
Published 3 years ago • 4K plays • Length 5:20Download video MP4
Download video MP3
Similar videos
-
 5:50
5:50
tightly-coupled fusion of global positional measurements in optimization-based vio (iros 2020)
-
 3:42
3:42
learned inertial odometry for autonomous drone racing (ral 2023 narrated)
-
 1:42
1:42
learned inertial odometry for autonomous drone racing (ral 2023)
-
![dm-vio: delayed marginalization visual-inertial odometry [code online]](https://i.ytimg.com/vi/7iep3BvcJPU/mqdefault.jpg) 2:58
2:58
dm-vio: delayed marginalization visual-inertial odometry [code online]
-
 2:55
2:55
msckf-based vio
-
 26:56
26:56
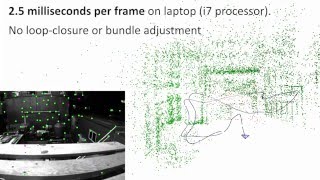
navion: an energy-efficient visual-inertial odometry accelerator for micro robotics
-
 13:22
13:22
cooperative visual-inertial odometry - icra 2021 presentation
-
 3:00
3:00
a benchmark comparison of monocular visual-inertial odometry algorithms for flying robots
-
 7:12
7:12
vilens: visual, inertial, lidar, and leg odometryfor all-terrain legged robots
-
 3:03
3:03
svo 2.0: semi-direct visual odometry for monocular and multi-camera systems
-
 12:11
12:11
faster than fast: gpu-accelerated frontend for high-speed vio (iros 2020)
-
 0:45
0:45
navion: visual-inertial odometry on chip (rss 2017)
-
 1:28
1:28
modus v™: experience automation, visualization, and robotics
-
 0:25
0:25
3d measurement with collaborative robots
-
 13:36
13:36
codevio: visual-inertial odometry with learned optimizable dense depth