dynamically stable 3d quadruped walking with multi-domain hybrid system models
Published 6 years ago • 212 plays • Length 0:53Download video MP4
Download video MP3
Similar videos
-
 1:02
1:02
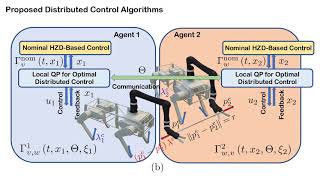
distributed feedback controllers for stable cooperative locomotion of quadrupedal robots
-
 10:37
10:37
exponentially stabilizing controllers for multi-contact 3d bipedal locomotion
-
 3:39
3:39
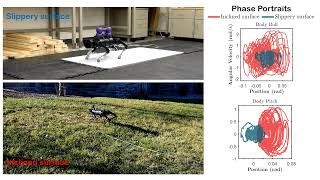
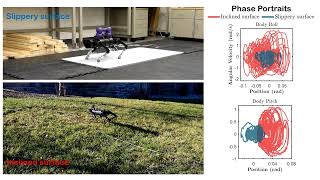
robust stabilization of quadrupedal locomotion via qp-based virtual constraint controllers
-
 12:18
12:18
how robot armies will save our future cities | kaveh akbari hamed | tedxpearlstreet
-
 6:53
6:53
iros22: toward a data-driven template model for quadrupedal locomotion
-
 4:10
4:10
robust control for quadrupedal locomotion: learning the gap between reduced- and full-order models
-
 9:16
9:16
layered control for cooperative locomotion of two quadrupedal robots
-
 3:29
3:29
decentralized event-based controllers for robust stabilization of hybrid periodic orbits
-
 1:48
1:48
event-based stabilization of periodic orbits for underactuated 3d bipedal robots
-
 10:38
10:38
layered control algorithms for cooperative locomotion of two quadrupedal robots
-
 1:31
1:31
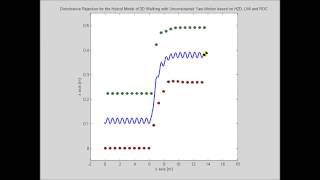
robust stabilizing virtual constraints for underactuated 3d walking of atrias 2.1 on uneven ground
-
 4:08
4:08
toward a data driven template model for quadrupedal locomotion
-
 1:53
1:53
robust stabilizing virtual constraints for underactuated 3d walking of a five-link bipedal robot
-
 2:57
2:57
toward a data-driven template model for quadrupedal locomotion
-
 4:10
4:10
robust mpc for quadrupedal locomotion
-
 3:21
3:21
real-time planning and nonlinear control for quadrupedal locomotion with articulated tails
-
 0:40
0:40
multiple workstations | robot mounted 3d camera example - by zivid
-
 1:01
1:01
hierarchical feedback control for multiagent legged robotic systems
-
 0:25
0:25
fastest 100 meters by a bipedal robot - 24.73 seconds 🤖