distributed feedback controllers for stable cooperative locomotion of quadrupedal robots
Published 5 years ago • 274 plays • Length 1:02Download video MP4
Download video MP3
Similar videos
-
 9:16
9:16
layered control for cooperative locomotion of two quadrupedal robots
-
 10:38
10:38
layered control algorithms for cooperative locomotion of two quadrupedal robots
-
 6:17
6:17
cooperative locomotion via supervisory predictive control and distributed controllers
-
 3:39
3:39
robust stabilization of quadrupedal locomotion via qp-based virtual constraint controllers
-
 16:08
16:08
cdc 2022: distributed quadratic programming-based nonlinear controllers for legged locomotion
-
 4:10
4:10
robust control for quadrupedal locomotion: learning the gap between reduced- and full-order models
-
 4:10
4:10
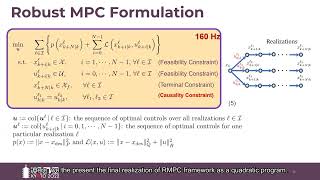
robust mpc for quadrupedal locomotion
-
 3:40
3:40
hierarchical and safe motion control for cooperative human-robot locomotion
-
 2:49
2:49
hierarchical control of cooperative locomotion of guide dogs and humans
-
 3:27
3:27
genloco: generalized locomotion controllers for quadrupedal robots
-
 4:37
4:37
quadrupedal locomotion via event-based predictive control and qp-based virtual constraints (full)
-
 2:35
2:35
distributed planning of collaborative locomotion: a physics-based and data-driven approach
-
 5:17
5:17
dynamic output controllers for stabilization of multi-domain robotic locomotion
-
 1:01
1:01
hierarchical feedback control for multiagent legged robotic systems
-
 6:51
6:51
iros22: robust predictive control for quadrupedal locomotion
-
 0:53
0:53
dynamically stable 3d quadruped walking with multi-domain hybrid system models
-
 0:56
0:56
they built a real life gundam robot
-
![decentralized control schemes for stable quadrupedal locomotion [supplementary video]](https://i.ytimg.com/vi/yLSnVjy7byc/mqdefault.jpg) 1:17
1:17
decentralized control schemes for stable quadrupedal locomotion [supplementary video]