genloco: generalized locomotion controllers for quadrupedal robots
Published 2 years ago • 4.1K plays • Length 3:27Download video MP4
Download video MP3
Similar videos
-
 1:41
1:41
learning torque control for quadrupedal locomotion
-
 5:00
5:00
learning quadrupedal locomotion over challenging terrain
-
 1:16
1:16
planning and control for dynamic quadrupedal locomotion | simulation demo
-
 2:15
2:15
dynamic locomotion and whole-body control for quadrupedal robots
-
 1:47
1:47
highly dynamic quadruped locomotion via whole-body impulse control and model predictive control
-
 3:01
3:01
an agile monopedal hopping quadcopter with synergistic hybrid locomotion
-
 19:01
19:01
building an internal cycloidal robotic actuator
-
 7:10
7:10
building robot legs for kids | challengers by freethink
-
 3:39
3:39
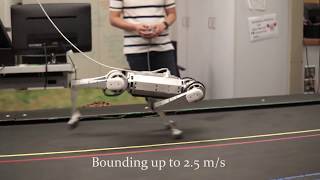
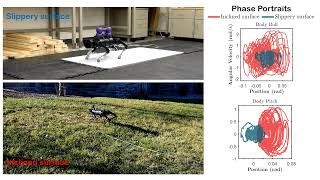
robust stabilization of quadrupedal locomotion via qp-based virtual constraint controllers
-
 4:10
4:10
robust control for quadrupedal locomotion: learning the gap between reduced- and full-order models
-
 1:02
1:02
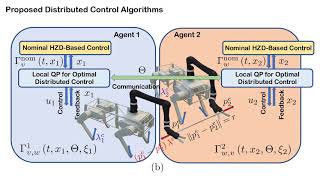
distributed feedback controllers for stable cooperative locomotion of quadrupedal robots
-
 5:58
5:58
learning robust perceptive locomotion for quadrupedal robots in the wild
-
 3:13
3:13
a simple yet effective whole-body locomotion framework for quadruped robots
-
 3:36
3:36
learning a contact-adaptive controller for robust, efficient legged locomotion
-
 5:00
5:00
proprioception and tail control enable extreme terrain traversal by quadruped robots
-
 4:37
4:37
quadrupedal locomotion via event-based predictive control and qp-based virtual constraints (full)
-
 0:31
0:31
quadruped robot leg prototype
-
 2:20
2:20
animal gaits on quadrupedal robots using motion matching and model based control - iros 2021
-
 1:01
1:01
hierarchical feedback control for multiagent legged robotic systems
-
 1:20
1:20
planning and control of skating motions for quadrupedal robots
-
 0:23
0:23
autonomous locomotion trajectory shaping and intelligent control for lower-limb exoskeletons