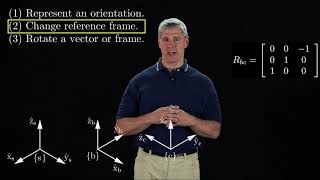
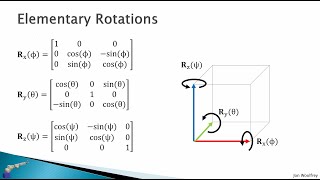
intro2robotics lecture 2: rotation matrices, so(n)
Published 4 years ago • 2.9K plays • Length 27:08Download video MP4
Download video MP3
Similar videos
-
 4:01
4:01
how close are 2 configurations of a robot? (lecture 23b, intro 2 robotics)
-
 4:14
4:14
modern robotics, chapter 3.2.1: rotation matrices (part 2 of 2)
-
 2:54
2:54
modern robotics, chapter 3.2.1: rotation matrices (part 1 of 2)
-
 24:33
24:33
intro2robotics lecture 3a: coordinate transformations, basic rotation matrices
-
 22:01
22:01
robotics 1 u1 (kinematics) s3 (rotation matrices) p1 (rotation matrices)
-
 19:12
19:12
intro2robotics lecture 14a: manipulator singularities
-
 55:07
55:07
rigid body kinematics introduction | rotation matrix relating frames in 3d | direction cosine matrix
-
 8:07
8:07
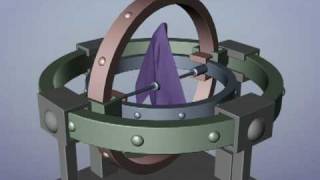
euler (gimbal lock) explained
-
 16:08
16:08
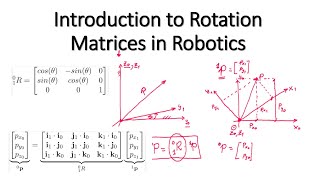
introduction to rotation matrices in robotics
-
 16:20
16:20
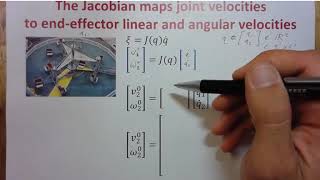
intro2robotics lecture 10b: jacobian & derivative of rotation matrices
-
 13:58
13:58
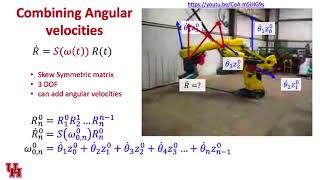
intro2robotics lecture 10a: angular velocity & skew symmetric matrices
-
 0:28
0:28
this can happen in thailand
-
 11:47
11:47
intro2robotics lecture 3b: composition of rotations, homogeneous transformations,
-
 0:18
0:18
#golfswing #fyp #waitforit #followthrough
-
 11:22
11:22
understanding the rotation matrix
-
 10:13
10:13
spatial descriptions and transformation matrices for robotic manipulators
-
 11:14
11:14
2.3 rotations in 3d
-
 13:55
13:55
intro2robotics lecture 11a, "derivative of a rotation matrix"