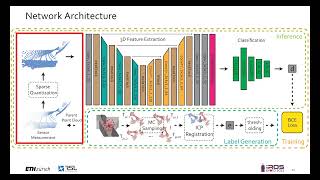
learning contact-based state estimation for assembly tasks
Published 1 year ago • 2.5K plays • Length 1:01Download video MP4
Download video MP3
Similar videos
-
 9:53
9:53
learning-based localizability estimation for robust lidar localization: iros22 best paper award talk
-
 3:00
3:00
viplanner: visual semantic imperative learning for local navigation (icra 2024)
-
 1:00
1:00
learning-based localizability estimation for robust lidar localization (supplementary)
-
 2:58
2:58
rethinking robustness assessment: adversarial attack on learning-based quadruped locomotion control
-
 8:50
8:50
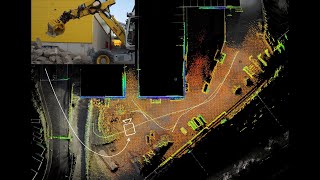
a framework for robotic excavation and dry stone construction using on-site materials
-
 0:28
0:28
this can happen in thailand
-
 0:53
0:53
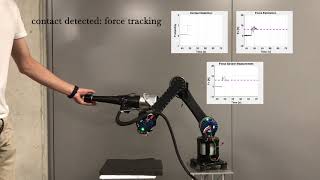
hybrid contact detection and force estimation during compliant manipulation
-
 3:20
3:20
deep measurement updates for bayes filters
-
![identifying terrain physical parameters from vision [ra-l]](https://i.ytimg.com/vi/SrAE0IK6UnE/mqdefault.jpg) 4:38
4:38
identifying terrain physical parameters from vision [ra-l]
-
 1:08
1:08
radiance fields for robotic teleoperation
-
 40:50
40:50
lecture - perception and learning for robotics - best practices ml-project
-
 2:56
2:56
resilient legged local navigation: learning to traverse with compromised perception end-to-end
-
 0:30
0:30
find the right components for your production machinery project
-
 5:38
5:38
proprioceptive invariant robot state estimation
-
 3:00
3:00
graph-based multi-sensor fusion for consistent localization of autonomous construction robots (sup.)