proprioceptive invariant robot state estimation
Published 6 months ago • 635 plays • Length 5:38Download video MP4
Download video MP3
Similar videos
-
 3:37
3:37
fully proprioceptive slip-velocity-aware state estimation for mobile robots
-
 4:22
4:22
legged robot state estimation using invariant kalman filtering and learned contact events
-
 2:01
2:01
state estimation using forward kinematic and contact factors
-
 0:18
0:18
proprioceptive whole-body contact estimation side push
-
 2:58
2:58
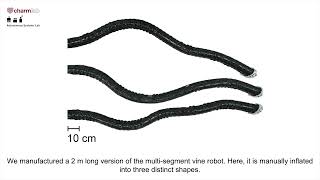
a multi-segment, soft growing robot with selective steering
-
 2:58
2:58
state estimation for hybrid wheeled-legged robots performing mobile manipulation tasks
-
 7:03
7:03
robot's self awareness: the key to proprioception
-
 4:24
4:24
learning inertial odometry for dynamic legged robot state estimation
-
 1:07:26
1:07:26
combining learning and geometry for robot perception and navigation
-
 0:34
0:34
robots enhance learning at msu
-
 1:58
1:58
visual task progress estimation with appearance invariant embeddings for robot control and planning
-
 12:16
12:16
toward force estimation in robot-assisted surgery using deep learning with vision and robot state
-
 21:36
21:36
cassie and mini cheetah autonomy at university of michigan
-
 0:39
0:39
university of michigan me 350
-
 1:11
1:11
expanding datasets for robots
-
 1:00
1:00
vision-guided robot state estimation
-
 2:09
2:09
olson's robots: from magic 2010 to railway detection
-
 1:42
1:42
first year engineering students design and test robots
-
 3:31
3:31
legged robot neck design for robust visual inertial state estimation (ra-l 2023)