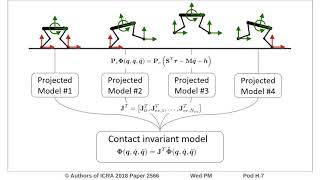
learning contact models for dynamic walking
Published 5 years ago • 98 plays • Length 0:38Download video MP4
Download video MP3
Similar videos
-
 3:36
3:36
learning a contact-adaptive controller for robust, efficient legged locomotion
-
 53:35
53:35
real-time optimization algorithms for dynamic walking, running, and manipulating robots
-
 3:00
3:00
contact invariant model learning for legged robot locomotion
-
 31:10
31:10
jan carius - optimization and learning algorithms for dynamic locomotion of walking robots
-
 1:36
1:36
data-efficient and safe learning for humanoid locomotion aided by a dynamic walking model
-
 5:11
5:11
biconmp : a nonlinear model predictive control framework for whole body motion planning
-
 2:57
2:57
contact model fusion for event-based locomotion in unstructured terrains
-
 2:48
2:48
iwalker: imperative visual planning for walking humanoid robot
-
 2:31
2:31
learning dynamic bipedal walking across stepping stones
-
 0:54
0:54
contact invariant model learning for legged robot locomotion
-
 3:05:06
3:05:06
dynamic walking 2021 - episode 2: (neural)control
-
 2:26
2:26
natural multicontact walking via musculoskeletal models on ampro3
-
 3:25:51
3:25:51
dynamic walking 2021 - episode 1: (bio)mechanics
-
 10:58
10:58
zhaoming xie | dynamic walking 2019
-
 11:02
11:02
icra 2021: learning task space actions for bipedal locomotion
-
 58:04
58:04
robot learning and perception for contact-rich manipulation
-
 13:01
13:01
icra 2021: learning spring mass locomotion
-
 59:43
59:43
dynamic walking 2013 : day 4 : 11 five minute poster talks
-
![contactnet: online multi-contact planning for acyclic legged robot locomotion [ur 2024]](https://i.ytimg.com/vi/ta1JpSigRKo/mqdefault.jpg) 2:55
2:55
contactnet: online multi-contact planning for acyclic legged robot locomotion [ur 2024]