modern robotics, chapter 2.3.1: configuration space topology
Published 6 years ago • 53K plays • Length 4:37Download video MP4
Download video MP3
Similar videos
-
 3:52
3:52
modern robotics, chapter 2.3.2: configuration space representation
-
 16:31
16:31
configuration, and configuration space (topology and representation) of a robot | lesson 2
-
 2:12
2:12
modern robotics, chapters 2 and 3: foundations of robot motion
-
 2:54
2:54
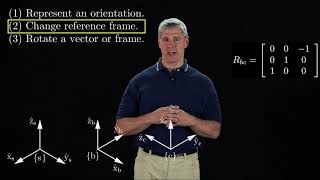
modern robotics, chapter 3.2.1: rotation matrices (part 1 of 2)
-
 2:50
2:50
modern robotics, chapter 11.2.1: error response
-
 2:04
2:04
modern robotics, chapter 3.2.3: exponential coordinates of rotation (part 1 of 2)
-
 5:15
5:15
modern robotics, chapter 2.1: degrees of freedom of a rigid body
-
 4:44
4:44
modern robotics, chapter 10.2: c-space obstacles
-
 17:44
17:44
robot motion planning: introduction, road map, and configuration spaces (part 1 of 3)
-
 4:14
4:14
modern robotics, chapter 3.2.1: rotation matrices (part 2 of 2)
-
 1:35
1:35
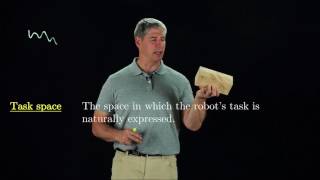
modern robotics, chapter 2.5: task space and workspace
-
 5:00
5:00
modern robotics, chapter 3.3.2: twists (part 1 of 2)
-
 5:43
5:43
modern robotics, chapter 2.2: degrees of freedom of a robot
-
 6:37
6:37
modern robotics, chapter 5.3: singularities
-
 8:46
8:46
robotics 2 u2 (vision and ai) s2 (problem solving and searching) p4 (breadth first and astar)
-
 0:46
0:46
topology of configuration space
-
 2:24
2:24
modern robotics, chapter 10.2.3: graphs and trees