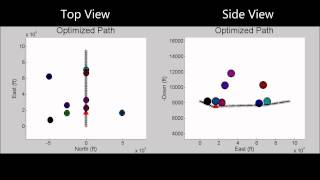
real time quad rotor path planning for mobile obstacle avoidance using convex optimization
Published 6 years ago • 2.4K plays • Length 1:27Download video MP4
Download video MP3
Similar videos
-
 3:12
3:12
aerial videography with dynamic obstacle avoidance
-
 0:43
0:43
pipg for real-time quadrotor trajectory optimization with time-triggered corridor constraints
-
 3:19
3:19
fast obstacle avoidancebased on real-time sensing
-
 0:52
0:52
real-time obstacle avoidance
-
 0:45
0:45
interactive obstacle avoidance
-
 2:06
2:06
real-time optimal collision-free motion planning of quadrotors using sequential convex programming
-
 55:25
55:25
stanford seminar - robots in dynamic tasks: learning, risk, and safety
-
 2:34
2:34
real time optimal planning and model predictive control of a multi rotor with a suspend
-
 0:55
0:55
convex path optimization for uav
-
 0:37
0:37
duality-based convex optimization for real-time obstacle avoidance between polytopes with cbfs
-
 1:57
1:57
the real-time kinodynamic planner: quadrotor obstacle avoidance
-
 2:57
2:57
optimal trajectory generation for quadrotor teach-and-repeat
-
 1:09
1:09
global path planning / obstacle avoidance on px4
-
 6:56
6:56
gps waypoint navigation for mobile robots | repeatability & obstacle avoidance demo
-
 1:26
1:26
robio2019-dynamic obstacle avoidance for uavs using a fast trajectory planning approach
-
 0:37
0:37
real-time guidance using embedded convex optimization for spacecraft rendezvous
-
 2:59
2:59
sequential convex programming methods for real-time optimal trajectory planning in autonomous racing
-
 1:10
1:10
optimization-based path planning for multiple quadrotors
-
 2:00
2:00
real-time docking