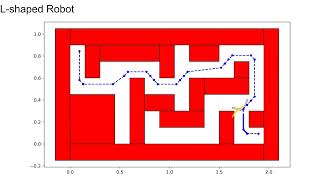
duality-based convex optimization for real-time obstacle avoidance between polytopes with cbfs
Published 1 year ago • 404 plays • Length 0:37Download video MP4
Download video MP3
Similar videos
-
 2:12
2:12
safety-critical control for obstacle avoidance between polytopes with control barrier functions
-
 10:04
10:04
convexity and the principle of duality
-
 1:27
1:27
real time quad rotor path planning for mobile obstacle avoidance using convex optimization
-
 2:01
2:01
walking in narrow spaces nmpc dcbf duality
-
 15:29
15:29
how i make machines see the 3d world | daniel cremers | tedxtum
-
 15:13
15:13
icra 2023: the best robots that will change the world! | robots of the future | pro robots
-
 4:43
4:43
reaching the limit in autonomous racing: optimal control versus reinforcement learning (scirob 23)
-
 1:06
1:06
distributed optimal affine formation maneuver via time-varying convex optimization-based protocols
-
 1:59
1:59
robust optimal planning and control of non-periodic bipedal locomotion
-
 1:10
1:10
using equilibria and virtual holonomic constraints to generate families of walking gaits
-
 3:43
3:43
motion planning around obstacles with convex optimization
-
 41:52
41:52
9. lagrangian duality and convex optimization
-
 6:02
6:02
primal dual augmented lagrangian solver for model predictive control | zhengyu fu
-
 6:00
6:00
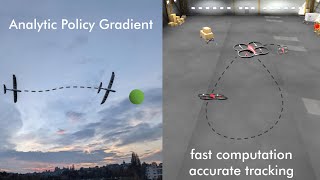
training efficient controllers via analytic policy gradient (icra 2023)
-
 2:06
2:06
real-time optimal collision-free motion planning of quadrotors using sequential convex programming
-
 40:08
40:08
multisensor fusion for low-power wireless microsystems: a neural approach
-
 1:49
1:49
active compensation unit | seamless force adjustment for complex surfaces | nordbo robotics