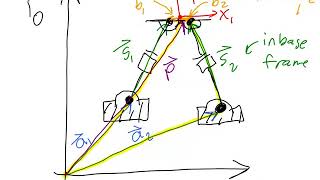
robotics 2 u1 (kinematics) s6 (parallel manipulators) p1 (introduction)
Published 6 years ago • 20K plays • Length 6:41Download video MP4
Download video MP3
Similar videos
-
 11:44
11:44
robotics 2 u1 (kinematics) s6 (parallel manipulators) p3 (inverse kinematics example)
-
 13:09
13:09
robotics 2 u1 (kinematics) s6 (parallel manipulators) p2 (inverse kinematics)
-
 21:28
21:28
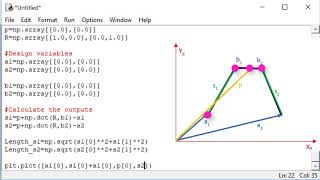
robotics 2 u1 (kinematics) s6 (parallel manipulators) p4 (python simulation)
-
 26:36
26:36
robotics 2 u1 (kinematics) s3 (jacobian matrix) p1 (intro and lab)
-
 3:49
3:49
spherical parallel manipulator
-
 15:54
15:54
how robots use maths to move
-
 1:00
1:00
parallel axis tripteron concept
-
 46:13
46:13
robotics 1 u1 (kinematics) s6 (inverse kinematics) p1 (inverse kinematics)
-
 2:20
2:20
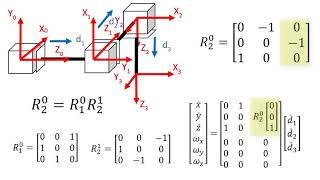
robotics 2 u1 (kinematics) s2 (denavit-hartenberg) p1 (intro)
-
 15:21
15:21
robotics 2 u1 (kinematics) s2 (denavit-hartenberg) p2 (frames)
-
 16:41
16:41
robotics 2 u1 (kinematics) s3 (jacobian matrix) p2 (finding the jacobian)
-
 25:57
25:57
robotics 1 u1 (kinematics) s6 (inverse kinematics) p2 (3-dof inverse kinematics)
-
 13:43
13:43
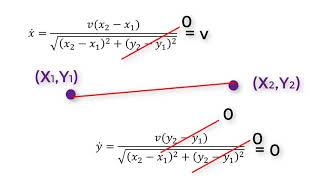
robotics 2 u1 (kinematics) s4 (path planning) p1 (using the jacobian)
-
 53:50
53:50
robotics 1 u1 (kinematics) s2 (kinematic diagrams) p1 (denavit-hartenberg frames)